한국폴리텍대학 전국 캠퍼스 안내
캠퍼스명을 선택하시면 해당 홈페이지로 이동합니다.
서울.경기: ①Ⅰ대학(1대학) ②Ⅱ대학(2대학), ▲연구원 강원도: ③Ⅲ대학(3대학) 충청북도: ④Ⅳ대학(4대학), ■기술대안고교 충청남도: ④Ⅳ대학(4대학), ★특성화 전라북도: ⑤Ⅴ대학(5대학), ●인재원, ◆교육원 전라남도: ⑤Ⅴ대학(5대학) 경상북도: ⑥Ⅵ대학(6대학), ★특성화 경상남도: ⑦Ⅶ대학(7대학), ★특성화 제주도: ①Ⅰ대학(1대학)
- 서울.경기 : 서울정수캠퍼스, 서울강서캠퍼스, 성남캠퍼스, 융합기술교육원, 인천캠퍼스, 남인천캠퍼스, 화성캠퍼스, 광명융합기술교육원, 반도체융합캠퍼스, 직업교육연구원
- 강원도 : 춘천캠퍼스, 원주캠퍼스, 강릉캠퍼스
- 충청북도 : 청중캠퍼스, 충주캠퍼스, 다솜고등학교
- 충청남도 : 대전캠퍼스, 아산캠퍼스, 충남캠퍼스, 바이오캠퍼스
- 경상북도 : 대구캠퍼스, 남대구캠퍼스, 구미캠퍼스, 포항캠퍼스, 영주캠퍼스, 영남융합기술캠퍼스, 로봇캠퍼스
- 전라북도 : 전북캠퍼스, 익산캠퍼스, 인재원, 신기술교육원
- 경상남도 : 창원캠퍼스, 부산캠퍼스, 울산캠퍼스, 동부산캠퍼스, 진주캠퍼스, 석유화학공정기술교육원, 항공캠퍼스
- 전라남도 : 광주캠퍼스, 전남캠퍼스, 순천캠퍼스, 전력기술교육원
- 제주도 : 제주캠퍼스
- ①Ⅰ대학
- ②Ⅱ대학
- ③Ⅲ대학
- ④Ⅳ대학
- ⑤Ⅴ대학
- ⑥Ⅵ대학
- ⑦Ⅶ대학
- ★특성화
- ●인재원
- ◆교육원
- ▲연구원
- ■기술대안고교







campus 콘텐츠영역
location영역
인천캠퍼스 본문
반도체시스템과
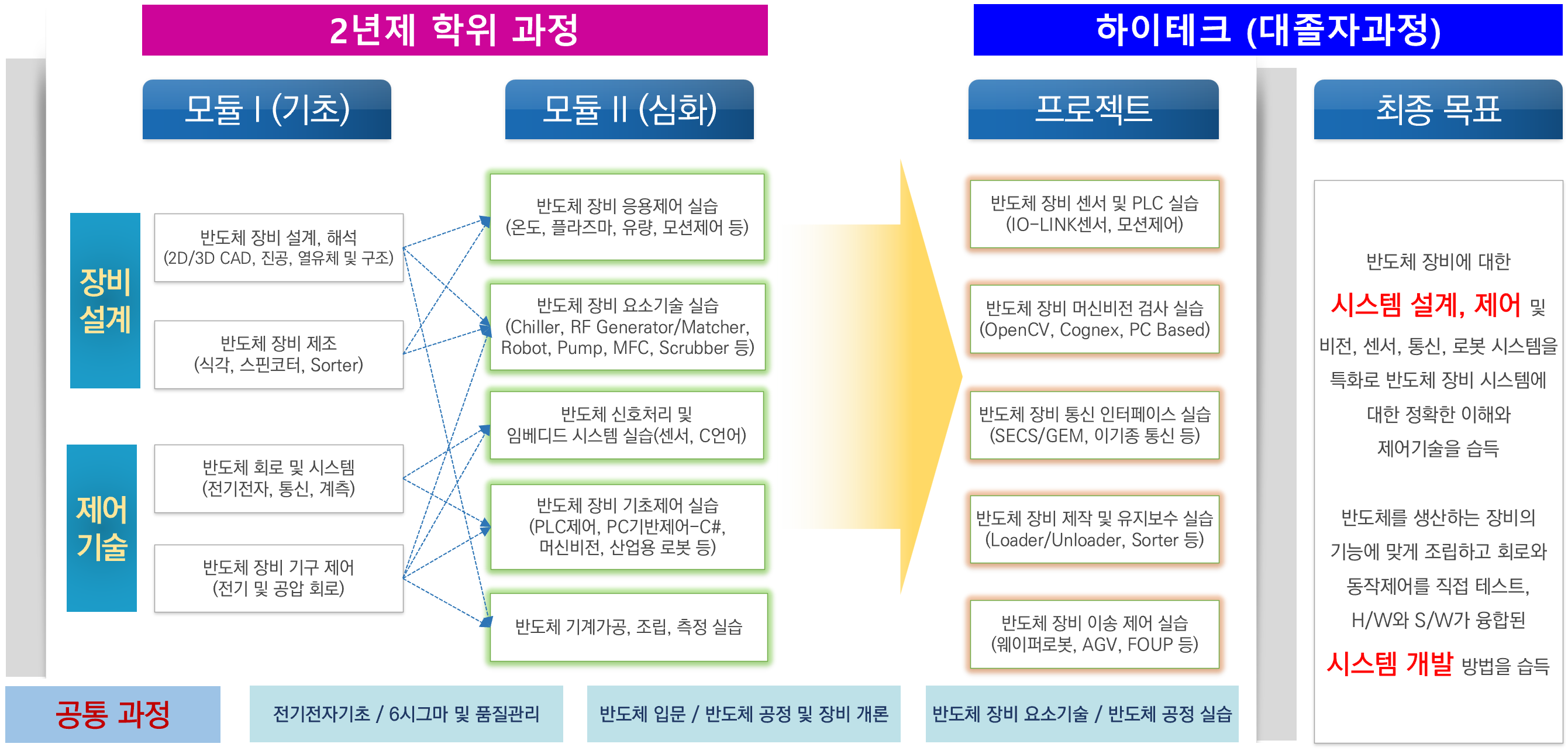





2년제 학위 과정과 하에테크(대졸자과정)은 연계되어 교육이 이루어집니다.
공통 과정, 전기전자기초 / 6시그마 및 품질관리, 반도체 입문/반도체 공정 및 장비 개론, 반도체 장비 요소기술/반도체 공정실습에
대해 장비설계, 제어기술에 대해
2년제 학위 과정에서 모듈1(기초), 모듈2(심화)과정 학습을 하고 하에테크(대졸자과정)에서 프로젝트를 수행하여 최종목표를 이루게 됩니다.
각 과정별 설명은 아래와 같습니다.
■ 2년제 학위 과정
▶모듈1(기초)
●장비설계
•반도체 장비 설계 해석(2D/3D CAD, 진공, 열유체 및 구조)
•반도체 장비 제조 (식각, 스핀코터, Sorter)
●제어기술
•반도체 회로 및 시스템 (전기전자, 통신, 계측)
•반도체 장비 기구 제어 (전기 및 공압 회로)
▶모듈2(심화)
•반도체 장비 응용제어 실습(온도, 플라즈마, 유량, 모션제어 등)
•반도체 장비 요소기술 실습(Chiller, RF Generator/Matcher,Robot, Pump, MFC, Scrubber 등)
•반도체 신호처리 및 임베디드 시스템 실습(센서, C언어)
•반도체 장비 기초제어 실습(PLC제어, PC기반제어-C#, 머신비전, 산업용 로봇 등)
•반도체 기계가공, 조립, 측정 실습
■ 하이테크 (대졸자과정)
▶프로젝트
•반도체 장비 센서 및 PLC 실습 (IO-LINK센서, 모션제어)
•반도체 장비 머신비전 검사 실습(OpenCV. Cognex, PC Based)
•반도체 장비 통신 인터페이스 실습 (SECS/GEM, 이기종 통신 등)
•반도체 장비 제작 및 유지보수 실습 (Loader/Unloader, Sorter 등)
•반도체 장비 이송 제어 실습 (웨이퍼로봇, AGV, FOUP 등)
▶최종 목표
•반도체 장비에 대한 시스템 설계, 제어 및 비전, 센서, 통신, 로봇 시스템을 특화로 반도체 장비 시스템에 대한 정확한 이해와 제어기술을 습득
•반도체를 생산하는 장비의 기능에 맞게 조립하고 회로와 동작제어를 직접 테스트. H/W와 S/W가 융합된 시스템 개발 방법을 습득
■ 반도체시스템과 특화기술 Concept 한국폴리텍대학 인천캠퍼스
제조기술, 검사기술, 통신기술, 센서기술, 이송기술에 대해서 도식화한 그림이며
각 기술별 상세한 설명은 아래와 같습니다.
■ 반도체시스템과 교육 특화기술I- 제조기술
▶제조기술
반도체 전반에 제조기술 및 공정 분석을 위한 기술 학습 ※반도체시스템과 - 반도체공정과 융합 공통과정운영
반도체 공정의 제조기술의 이해를 위한 과정으로 반도체 식각(PE-RIE) 장비 실습, UIApplication 제작 및 프로그래밍, Air & Gas Line 작업, 전장 Wire (커넥터 등), PLC제어 실습 등
▶반도체 식각 공정장비 (PE-RIE) 실습
• 상부 전극, 하부 전극, RF Generator 기술
• Vacuum 스위치, 자동압력조절기 기술
• Throttle Valve, Angle Valve 기술
• MFC, Vent Valve, Relief Valve 기술
▶식각공정 UI& 시스템 프로그래밍
• C# 기반 UI 화면작화 및 시스템 프로그래밍
• MFC 제어 밸브 조절, 진공펌프 조작
• RF Power, 온도조절기 등 시뮬레이션 실습
▶전장, 공압, PLC & PC기반 가상 시뮬레이션
• 전장제어(릴레이 등) 실험 실습
• 센서, 공압제어(솔레노이드 등) 실험 실습
• PLC(미쓰비시)기반 가상장비 실험 실습
• PC(C#)기반 가상장비 제어실습
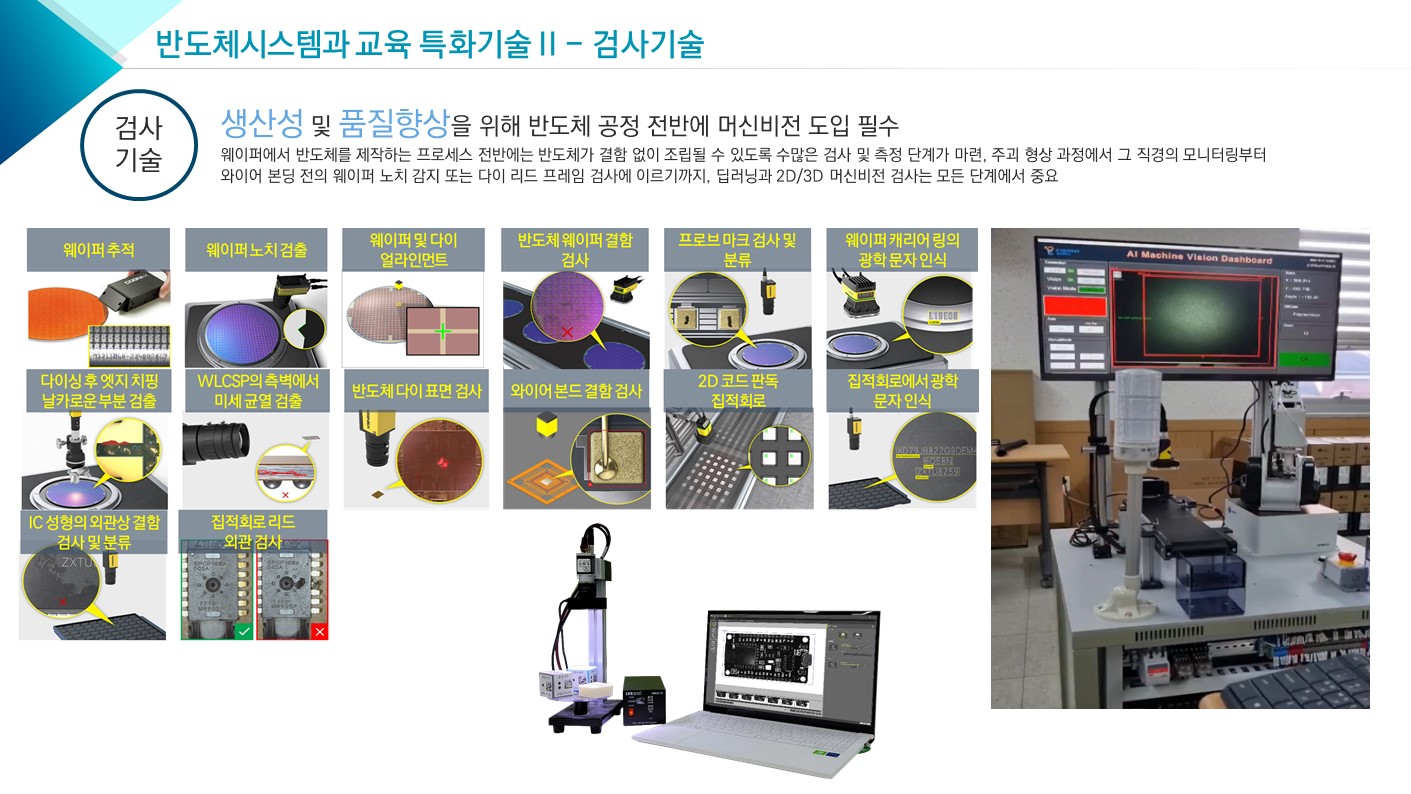
■ 반도체시스템과 교육 특화기술 II - 검사기술
▶검사기술
생산성 및 품질향상을 위해 반도체 공정 전반에 머신비전 도입 필수
웨이퍼에서 반도체를 제작하는 프로세스 전반에는 반도체가 결함 없이 조립될 수 있도록 수많은 검사 및 측정 단계가 마련, 주괴 형상 과정에서 그 직경의 모니터링부터 와이어 본딩 전의 웨이퍼 노치 감지 또는 다이 리드 프레임 검사에 이르기까지, 딥러닝과 2D/3D 머신비전 검사는 모든 단계에서 중요
웨이퍼추적, 웨이퍼노치검출, 웨이퍼 및 다이 얼라인먼트, 반도체 웨이퍼 결함 검사, 프로브마크 검사 및 분류,
웨이퍼캐리어링의 광학 문자인식, 다이싱후엣지 치핑 날카로운부분 검출, WLCSP의 측벽에서 미세균열 검출,
반도체 다이 표면 검사, 와이어 본드 결함 검사, 2D코드판독 집적회로, 집적회로에서 광학 문자인식,
IC성형의 외관상 결함 검사 및 분류, 집적회로리드 외관검사
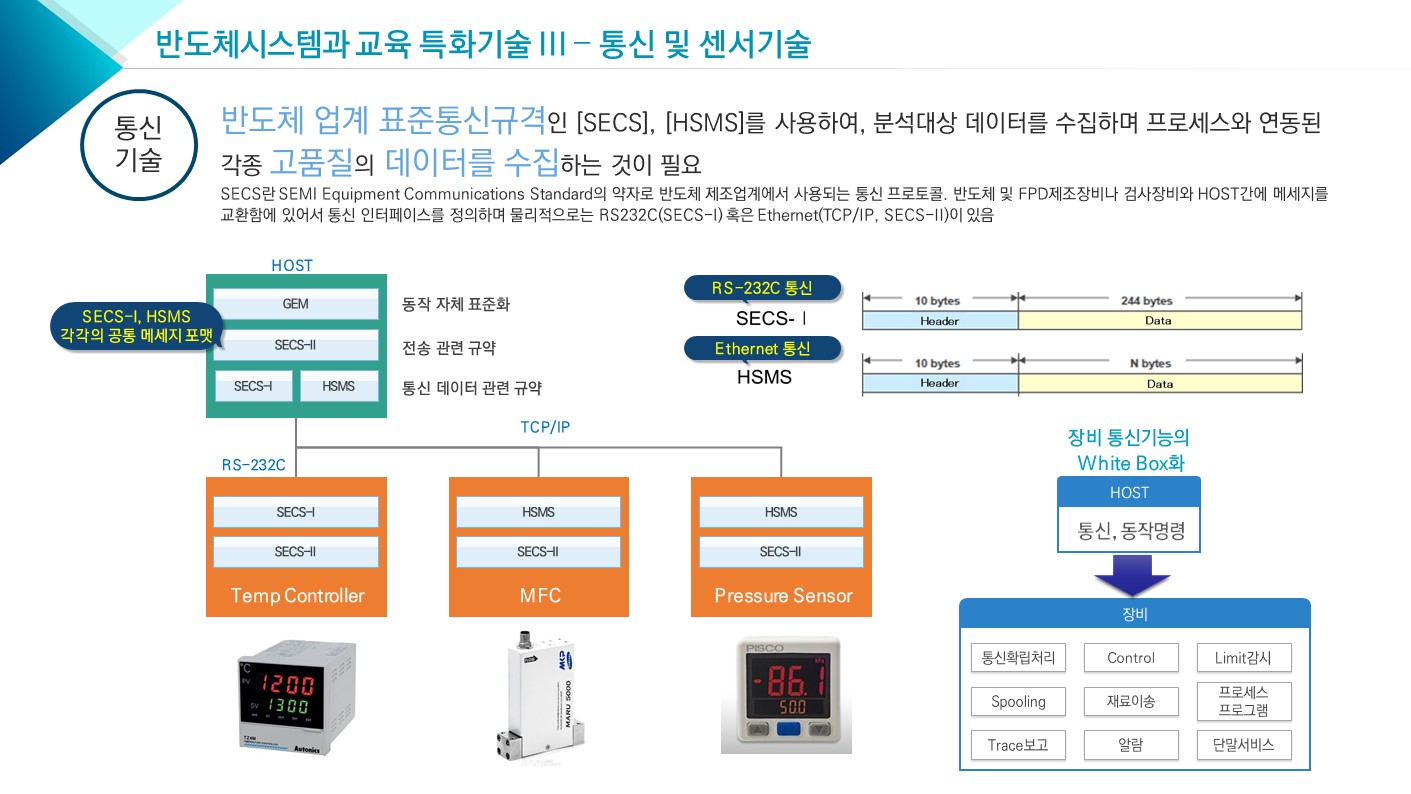
■ 반도체시스템과 교육 특화기술 III - 통신 및 센서기술
▶통신기술
반도체 업계 표준통신규격인 [SECS], [HSMS]를 사용하여, 분석대상 데이터를 수집하며 프로세스와 연동된 각종 고품질의 데이터를 수집하는 것이 필요
SECS란 SEMI Equipment Communications Standard의 약자로 반도체 제조업계에서 사용되는 통신 프로토콜. 반도체 및 FPD 제조장비나 검사장비와 HOST간에 메세지를 교환함에 있어서 통신 인터페이스를 정의하며 물리적으로는 RS232C(SECS-I) 혹은 Ethernet(TCP/IP, SECS-II)이 있음
위 내용을 도식화해서 추가로 설명한 그림이 있음
▶장비 통신기능의 White Box화
HOST(통신, 동작명령) →
장비(통신확립처리, Control, Limit감시, Spooling, 재료이송, 프로세스 프로그램, Trace보고, 알람, 단말서비스)
■ 반도체시스템과 교육 특화기술 III - 통신 및 센서기술
▶센서기술
소재 Material → (반도체/MEMS 공정) → 소자형 Device → (패키지/조립 공정) →모듈형 Module → (조립 공정) →시스템형 System
▶ 소재 Material
- 기본 재료
•실리콘 기판
•유리기판
•세라믹 기판
•Au, Ag, AzO, CNT 등
▶소자형 Device
- 소재를 사용하여 고유 기능이 구현된 것 부품이라고 함
•센서 칩
•센서 IC
•가속도 센서
•압력 센서
•온도 센서 등
▶모듈형 Module
- 복수의 부품 (소자)을 조립한 특정 기능을 가진 조그만 장치 (부품과 제품의 중간적 존재)
•압력 센서 모듈
•습도 센서 모듈
•가스 센서 모듈
•충격 센서 모듈
•인체 감시 센서 모듈 등
▶시스템형 System
-복수 센서, 입출력 장치, 제어 장치 등이 유기적으로 결합 작동되는 장치 (최종 제품이 많음)
•압력 모니터링
•온도 모니터링
•유량 모니터링 등
반도체/MEMS 공정 및 패키지 조립 공정 등 반도체 공정에 적용된 반도체 센서 요소기술 습득
■ 반도체시스템과 교육 특화기술 IV - 이송기술
▶ 이송기술
●FOUP(Front Opening Unified Pod), OHT(Overhead Hoist Transfer)
반도체 제조공정시 발생되는 각종 불순물로부터 Wafer를 보호하는 역할을 하며, Wafer의 세정, 적재, 보관, 이송 등 자동화 공정에 사용하기 위한 제품OHT는 사람의 개입 없이 수많은 공정 사이를 스스로 이동하는 장치로, 공장 천장에 설치된 레일을 따라 FOUP(Front Opening Unified Pod)에 담긴 웨이퍼를 생산공정별 제조 설비에 운반하는 역할을 담당
• 웨이퍼를 보관하거나 안전하게 이동할 수 있게 고안된 용기
• FOUP를 FAB 간, 층간, 공정 설비 간 운반하는 Vehicle
●AGV(Automated Guided Vehicle), AMR(Autonomous Mobile Robotics)
AGV는 바닥이나 천장 등에 부착된 자기 테이프, QR코드 또는 기차 선로와 유사한 레일등으로 유도되는 경로를 따라 이동
AMR은 탑재된 카메라, 라이다, 적외선 센서 등으로 수집된 각종 정보를 이용해 주변 환경을 탐지하고 장애물을 피하면서 목적지를 스스로 찾아 이동
• AGV는 무인운반차
• AMR은 자율주행로봇
■ 반도체시스템과 실습장비
▶통합성: 반도체 전공정 및 후공정의 전체공정 기술을 습득할 수 있는 교육커리큘럼 구성
• 가상 시뮬레이션 & 요소기술 실습(배선/가스/유량/온도 제어 등) - 식각 공정장비
• 반도체 제어 분야 주요 핵심 기술 실습(VISION, ROBOT 등)
●전공정:
웨이퍼 제조공정 → 산화공정 → 포토 공정 → 식각 공정(장비 도입) →증착 & 이온주입 공정 → 금속 배선 공정
→
●후공정
EDS 공정(Msion 장비 도입) → 패키징 공정(RoboVAGV 장비 도입)
▶안정성: 반도체 전공정의 위험요소를 배제한 요소기술 습득으로 학생들의 안정성 도모
• 일부 실습이 어려운 전공정 분야 가상 시뮬레이션을 통한 제어 실습
• 반도체 전공정 요소기술 실습 운영 (압력/유량/온도/ 레벨 등 PID제어 실습)
▶핵심기술: 반도체 공정의 Vision/Robot(Wafer, AGV, Sorter 등) 분야의 특화 기술 습득
• 반도체 8대 공정에 접목한 VISION검사 주요 핵심기술 습득 - 가이드,검사, 측정,인식
• 반도체 제품 이송(Wafer. AGV, Sorter 등)을 위한 ROBOT 주요 핵심기술 습득 - Wafer Robot, AGV, Sorter