한국폴리텍대학 전국 캠퍼스 안내
캠퍼스명을 선택하시면 해당 홈페이지로 이동합니다.
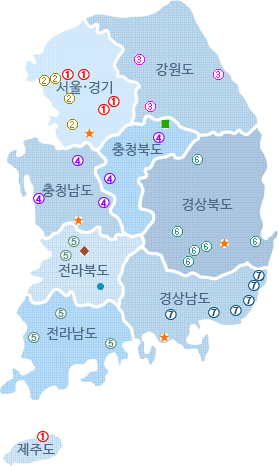
서울.경기: ①Ⅰ대학(1대학) ②Ⅱ대학(2대학) 강원도: ③Ⅲ대학(3대학) 충청북도: ④Ⅳ대학(4대학), ■기술대안고교 충청남도: ④Ⅳ대학(4대학), ★특성화 전라북도: ⑤Ⅴ대학(5대학), ●인재원, ◆신기술교육원 전라남도: ⑤Ⅴ대학(5대학) 경상북도: ⑥Ⅵ대학(6대학), ★특성화 경상남도: ⑦Ⅶ대학(7대학), ★특성화 제주도: ①Ⅰ대학(1대학)
- 서울.경기 : 서울정수캠퍼스, 서울강서캠퍼스, 성남캠퍼스, 융합기술교육원, 인천캠퍼스, 남인천캠퍼스, 화성캠퍼스, 광명융합기술교육원, 반도체융합캠퍼스
- 강원도 : 춘천캠퍼스, 원주캠퍼스, 강릉캠퍼스
- 충청북도 : 청중캠퍼스, 충주캠퍼스, 다솜고등학교
- 충청남도 : 대전캠퍼스, 아산캠퍼스, 충남캠퍼스, 바이오캠퍼스
- 경상북도 : 대구캠퍼스, 남대구캠퍼스, 구미캠퍼스, 포항캠퍼스, 영주캠퍼스, 영남융합기술캠퍼스, 로봇캠퍼스
- 전라북도 : 전북캠퍼스, 익산캠퍼스, 인재원, 신기술교육원
- 경상남도 : 창원캠퍼스, 부산캠퍼스, 울산캠퍼스, 동부산캠퍼스, 진주캠퍼스, 석유화학공정기술교육원, 항공캠퍼스
- 전라남도 : 광주캠퍼스, 전남캠퍼스, 순천캠퍼스
- 제주도 : 제주캠퍼스
- ①Ⅰ대학
- ②Ⅱ대학
- ③Ⅲ대학
- ④Ⅳ대학
- ⑤Ⅴ대학
- ⑥Ⅵ대학
- ⑦Ⅶ대학
- ★특성화
- ●인재원
- ◆신기술교육원
- ■기술대안고교
수도권
경상도
제주도






campus 콘텐츠영역
location영역
로봇캠퍼스 본문
시설 및 장비
실습장현황
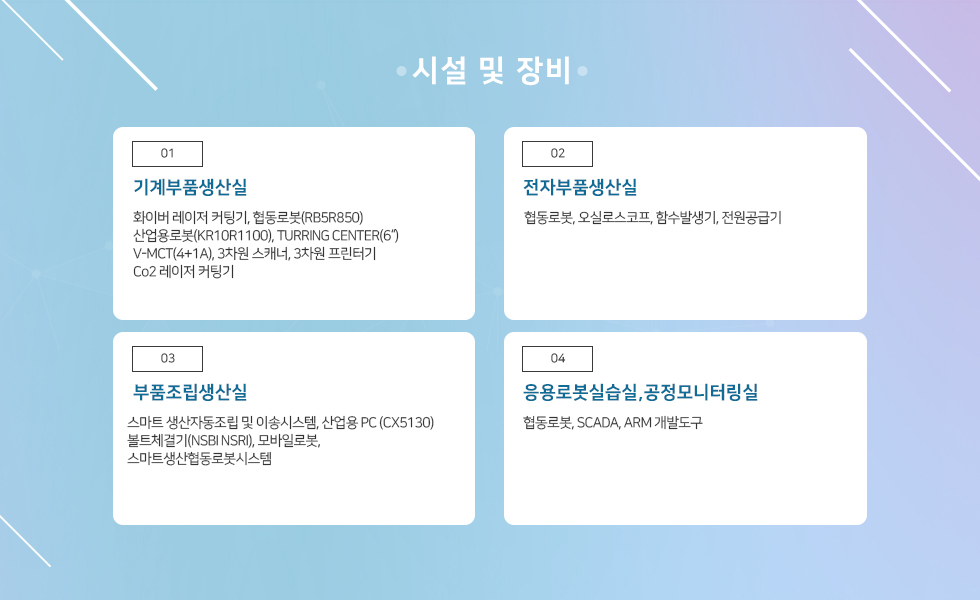
시설 및 장비
| 실습실 | 장비명 | 규격 | 비고 |
|---|---|---|---|
| 기계부품생산실 | 화이버 레이저 커팅기 | CW Fiber laser, 레이저출력 750W, Wavelengthe 1070mm(±10nm),냉각능력 2300W, Working Area(1200mm x 900mm), Z-Axis Stroke(100mm), Power Consumption(12.5KVA) | 탑레이저 장비사용 |
| 협동로봇(RB5R850) | 다관절형 6축로봇, Reach 850mm, Payload 5kg, Position Repeatability 0.1mm, IP등급:ip54, 로봇비전카메라, 로봇 암 부착형, 로봇 토크센서 규격용량:200Nm | 레인보우로봇제조사 | |
| 산업용로봇(KR10R1100) | 6축 다관절 로봇, 최대반경: 1100mm, 가반하중 : 10kg, 반복정밀도: ±0.01mm 로봇 보호등급:IP54, 스마트패드 8.4inch |
KUKA로보틱스제조사 | |
| TURRING CENTER(6“) | 콘트롤러 : FANUC-OiF, 베드위의 스윙:∅500mm, 새들위의 스윙:∅350mm, 최대 가공경:∅350mm이상, 최대 가공길이:280mm이상, 주축 사이즈 : 6“, 주축회전속도: 5000rpm, 공구터렛:12EA | 현대위아, 두산공작기계장비 | |
| V-MCT(4+1A) | 콘트롤러:FANUC, 테이블크기 1250x560mm, 주축회전수:12000rpm, 주축테이퍼 ISO #40, ATC 공구수량:30EA, 공구규격:BT40&BBT40, 고정도 롤러 LM GUIDE 채택, 제어축:4+1, 기상측정장치(OMV) 블룸노보테스트 |
현대위아 KF5600C | |
| 3차원 스캐너 | 비접촉식 3차원 스캐너, 레이저 스캔방식, 터치식 측정 Probe를 동시 사용, 7축 다관절 구성, PSmodel, DGK 모델 측정 및 분석 가능한 S/W, 측정타입:7Axis Protable, 측정반경:2000mm, Point Repeatability:0.033mm, 운용S/W:PowerINSPECT | Absolute Arm 8320 장비 | |
| 3차원 프린터기 | 조형크기 : 228 * 200 * 300 (노즐1) 228 * 200 * 300(노즐2), 적층두께 : 0.05 ~ 0.4mm, 노즐직영 : 0.4 mm, 프린터 베드 : Flexible Heating Bed | 신도리코 모델 DP103, DP303 | |
| Co2 레이저 커팅기 | 작업대는 1060x760mm(±10mm), 작업대 소프트웨어 : 장비전용 컴퓨터에 최신버젼 설치 및 CD | 아크릴, 목재 레이저 커팅 | |
| 전자부품생산실 | 협동로봇 | 6축로봇, Payload : 3kg, 동작범위: 500mm 협동로봇을 이용하여 다양한 업무 수행, 협동로봇 실습 |
|
| 오실로스코프 | 200MHz, 4ch | ||
| 함수발생기 | 1uHz~25MHz, 2ch | ||
| 전원공급기 | 0~3A, 0~30V, 2ch | ||
부품조립생산실 |
스마트 생산자동조립 및 이송시스템 | 3000(L)x2000(H)mm, 물류자동화시스템 (데이터관리용 서버PC, AC서보모터 제어용 모션드라이브) |
|
| 산업용 PC (CX5130) | Intel Atom 1.75Ghz, 인텔 아톰 프로세서 디지털입력/출력 각 32점, 아날로그 입력/출력 (DC 0~10V) | ||
| 볼트체결기(NSBI NSRI) | DC15V 1A, 자동볼트체결 및 나사공급유닛, 서보모터 등 | ||
| 모바일로봇 | 적재중량 : 90kg, 6축 로봇, 동작시간 10시간 모바일로봇 위에 협동로봇을 장착하여 릴레이 조립과 같은 정밀한 작업 수행 |
||
| 스마트생산협동로봇시스템 | 6축로봇, Payload : 6kg, 동작범위: 900mm 협동로봇을 이용하여 드론조립 및 이송작업 수행, 협동로봇 실습 |
||
응용로봇실습실,공정모니터링실 |
협동로봇 | 6축로봇, Payload : 3kg, 동작범위: 500mm 협동로봇을 이용하여 다양한 업무 수행, 협동로봇 실습 |
|
| SCADA | Tag 75, 다양한 산업용 통신 지원 원격 데이터수집 및 제어 |
||
| ARM 개발도구 | ARM Compiler(Cortex-M4), 120MHz, STM429ZI |
장비현황
